
تشخیص پیش زمینه
این مقاله ممکن است برای مطابقت با استانداردهای کیفی ویکیپدیا نیازمند بازنویسی باشد. |
تشخیص پیش زمینه یکی از وظایف اصلی در زمینه بینایی کامپیوتری و پردازش تصویر است که هدف آن تشخیص تغییرات در توالی تصویر است. تفریق پسزمینه هر تکنیکی است که اجازه میدهد پیشزمینه تصویر برای پردازش بیشتر (تشخیص شی و غیره) استخراج شود. بسیاری از برنامه ها نیازی به دانستن همه چیز در مورد تکامل حرکت در یک توالی ویدیو ندارند، بلکه فقط به اطلاعات تغییرات در صحنه نیاز دارند، زیرا مناطق مورد نظر یک تصویر، اشیا (انسان، اتومبیل، متن و غیره) در پیش زمینه آن هستند. پس از مرحله پیش پردازش تصویر (که ممکن است شامل حذف نویز تصویر ، پس پردازش مانند مورفولوژی و غیره باشد) محلی سازی شی مورد نیاز است که ممکن است از این تکنیک استفاده کند. تشخیص پیش زمینه بر اساس این تغییرات که در پیش زمینه رخ می دهد، پیش زمینه را از پس زمینه جدا می کند. این مجموعهای از تکنیکها است که معمولاً توالیهای ویدیویی ضبطشده در زمان واقعی با یک دوربین ثابت را تجزیه و تحلیل میکند.
فیلتر میانگین زمانی[ویرایش]
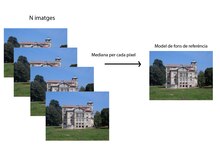
فیلتر میانگین زمانی روشی است که در Velastin پیشنهاد شده است. این سیستم مدل پسزمینه را از میانه تمام پیکسلهای تعدادی از تصاویر قبلی تخمین میزند. این سیستم از یک بافر با مقادیر پیکسل آخرین فریم ها برای به روز رسانی میانه هر تصویر استفاده می کند.برای مدلسازی پسزمینه، سیستم تمام تصاویر را در یک دوره زمانی معین به نام زمان آموزش بررسی میکند .
پس از دوره آموزشی برای هر فریم جدید، هر پیکسل با مقدار ورودی وجوه محاسبه شده قبلی مقایسه می شود. اگر پیکسل ورودی در یک آستانه باشد، پیکسل مطابق با مدل پسزمینه در نظر گرفته میشود و مقدار آن در pixbuf گنجانده میشود. در غیر این صورت، اگر مقدار خارج از این آستانه باشد، پیکسل به عنوان پیش زمینه طبقه بندی می شود و در بافر گنجانده نمی شود.
اما این روش را نباید کارآمد در نظر گرفت زیرا آنها مبنای آماری دقیقی ارائه نمی دهند و به بافری نیاز دارند که هزینه محاسباتی بالایی دارد.
رویکرد های موسوم[ویرایش]
در رویکرد های موسوم یک الگوریتم تفریق پسزمینه قوی باید بتواند تغییرات نور، حرکات تکراری ناشی از بهم ریختگی و تغییرات طولانیمدت صحنه را مدیریت کند. حال شاید از خود بپرسید که چگونه؟ تحلیلهای زیر از تابع V ( x ، y ، t ) بهعنوان یک دنباله ویدیویی استفاده میکنند که در آن t بعد زمان، x و y متغیرهای مکان پیکسل هستند. به عنوان مثال V (1،2،3) شدت پیکسل در (1،2) محل پیکسل تصویر در t = 3 در دنباله ویدیو است.
تکنیک های تشخیص پیش زمینه[ویرایش]
از تمام تکنیکهای تشخیص مبتنی بر مدلسازی پسزمینه تصویر هستند، باید پسزمینه را تنظیم کنید و تشخیص دهید که کدام تغییرات رخ میدهد. تعریف پسزمینه زمانی که دارای اشکال، سایهها و اجسام متحرک باشد میتواند بسیار دشوار باشد. در تعریف پسزمینه، فرض میشود که اجسام ساکن میتوانند در طول زمان از نظر رنگ و شدت متفاوت باشند. یک سری از سناریوهایی که این تکنیک ها در آنها اعمال می شود بسیار متنوع هستند. میتواند توالیهای بسیار متغیری مانند تصاویر با نور، فضای داخلی، خارجی، کیفیت و نویز بسیار متفاوت داشته باشد. علاوه بر پردازش در زمان واقعی، سیستم ها باید بتوانند با این تغییرات سازگار شوند.
یک سیستم تشخیص پیش زمینه بسیار خوب باید بتواند:
- یک مدل پس زمینه (تخمین) ایجاد کنید.
- نسبت به تغییرات نور، حرکات تکراری (برگ ها، امواج، سایه ها) و تغییرات طولانی مدت قوی باشید.

منابع[ویرایش]
Comparisons[ویرایش]
Several comparison/evaluation papers can be found in the literature:
- A. Sobral, A. Vacavant. "A comprehensive review of background subtraction algorithms evaluated with synthetic and real videos[پیوند مرده]". Computer Vision and Image Understanding, CVIU 2014, 2014.
- A. Shahbaz, J. Hariyono, K. Jo, "Evaluation of Background Subtraction Algorithms for Video Surveillance", FCV 2015, 2015.
- Y. Xu, J. Dong, B. Zhang, D. Xu, "Background modeling methods in video analysis: A review and comparative evaluation', CAAI Transactions on Intelligence Technology, pages 43–60, Volume 1, Issue 1, January 2016.
Books[ویرایش]
- T. Bouwmans, F. Porikli, B. Horferlin, A. Vacavant, Handbook on "Background Modeling and Foreground Detection for Video Surveillance: Traditional and Recent Approaches, Implementations, Benchmarking and Evaluation", CRC Press, Taylor and Francis Group, June 2014. (For more information: http://www.crcpress.com/product/isbn/9781482205374)
- T. Bouwmans, N. Aybat, and E. Zahzah. Handbook on Robust Low-Rank and Sparse Matrix Decomposition: Applications in Image and Video Processing, CRC Press, Taylor and Francis Group, May 2016. (For more information: http://www.crcpress.com/product/isbn/9781498724623)
Journals[ویرایش]
- T. Bouwmans, L. Davis, J. Gonzalez, M. Piccardi, C. Shan, Special Issue on "Background Modeling for Foreground Detection in Real-World Dynamic Scenes", Special Issue in Machine Vision and Applications, July 2014.
- A. Vacavant, L. Tougne, T. Chateau, Special section on "Background models comparison", Computer Vision and Image Understanding, CVIU 2014, May 2014.
- A. Petrosino, L. Maddalena, T. Bouwmans, Special Issue on "Scene Background Modeling and Initialization", Pattern Recognition Letters, September 2017.
- T. Bouwmans, Special Issue on "Detection of Moving Objects", MDPI Journal of Imaging, 2018.
Workshops[ویرایش]
- Background Learning for Detection and Tracking from RGB videos (RGBD 2017) Workshop in conjunction with ICIAP 2017. (For more information: http://rgbd2017.na.icar.cnr.it/)
- Scene Background Modeling and Initialization (SBMI 2015) Workshop in conjunction with ICIAP 2015. (For more information: http://sbmi2015.na.icar.cnr.it/)
- IEEE Change Detection Workshop in conjunction with CVPR 2014. (For more information: http://www.changedetection.net/)
- Workshop on Background Model Challenges (BMC 2012) in conjunction with ACCV 2012. (For more information: http://bmc.iut-auvergne.com/)
Contests[ویرایش]
- IEEE Scene Background Modeling Contest (SBMC 2016) in conjunction with ICPR 2016 (For more information: http://pione.dinf.usherbrooke.ca/sbmc2016/)